



Известный поворотное устройство принцип
Все мы слышали о поворотном устройстве, о его роли в автоматизации производства, в оптимизации логистических цепочек. Но часто разговоры об этом сводятся к общим фразам, к описанию функционала, без погружения в детали, без понимания реальных сложностей. Как на практике реализуется принцип работы поворотного устройства? Какие подводные камни возникают? Как добиться максимальной эффективности и надежности? Попробую поделиться опытом, робкими выводами, возможно, что-то покажется очевидным, а что-то – новым. Не претендую на абсолютную истину, это скорее размышления специалиста, столкнувшегося с этим оборудованием много раз.
Суть принципа: от теории к практике
На самом базовом уровне, поворотное устройство – это механизм, обеспечивающий изменение ориентации объекта в пространстве. Это может быть поворот вокруг одной оси, вокруг двух или даже трех осей, в зависимости от конструкции и назначения. Теоретически все просто: двигатель, редуктор, приводные валы, система управления. Но на практике возникает куча нюансов. Во-первых, это точные расчеты момента и скорости вращения, чтобы избежать перегрузок и деформаций. Во-вторых, это контроль за точностью позиционирования, особенно если речь идет о сложных сборочных операциях. В-третьих, это обеспечение надежности и долговечности механизма, особенно в условиях интенсивной эксплуатации.
Я помню один случай, когда мы проектировали поворотное устройство для линии по сборке крупногабаритных деталей. Изначально, мы выбрали довольно простой двигатель, полагая, что он обеспечит достаточную мощность. Но в процессе испытаний выяснилось, что двигатель перегревается и быстро выходит из строя. Пришлось пересмотреть конструкцию и выбрать более мощный, с эффективной системой охлаждения. Это был болезненный, но важный урок.
Особенности выбора привода
Выбор привода – критический момент. Электрические приводы – наиболее распространенный вариант, но есть и гидравлические, пневматические, даже шаговые. Каждый из них имеет свои преимущества и недостатки. Электрические приводы, как правило, более компактны и экологичны, но гидравлические и пневматические приводы обеспечивают большую мощность и надежность при высоких нагрузках. Шаговые приводы подходят для задач, требующих высокой точности позиционирования.
В наше время все чаще применяются приводы с обратной связью. Это позволяет контролировать скорость, положение и момент вращения с высокой точностью. Это особенно важно в автоматизированных системах, где требуется согласованная работа нескольких поворотных устройств.
Проблемы точности позиционирования
Точность позиционирования – это один из самых сложных аспектов при проектировании и эксплуатации поворотных устройств. На точность влияют множество факторов: качество изготовления деталей, точность сборки, влияние внешних факторов (температура, вибрация), ошибки в управлении.
В одной из наших компаний, ООО Чжэцзян Вэйнэн интеллектуальное оборудование, мы столкнулись с проблемой отклонения детали от заданного положения на несколько миллиметров. Оказалось, что это связано с деформацией вала при высоких нагрузках. Для решения этой проблемы пришлось использовать компенсацию деформации, а также улучшить систему управления и контроль за нагрузкой.
Использование энкодеров и датчиков положения
Для обеспечения высокой точности позиционирования используются энкодеры и датчики положения. Энкодеры – это устройства, которые преобразуют угловое перемещение в электрические сигналы. Датчики положения – это устройства, которые измеряют угол поворота вала. Эти данные используются для управления двигателем и обеспечения точного позиционирования.
Выбор энкодера или датчика положения зависит от требуемой точности и скорости работы. Для высокоточных задач, требующих очень высокой точности позиционирования, используются оптические энкодеры. Для менее требовательных задач можно использовать инкрементные энкодеры или датчики Холла.
Реальные примеры применения
Поворотные устройства используются в самых разных областях: в машиностроении, в робототехнике, в авиастроении, в космической отрасли. Они применяются для поворота деталей, для позиционирования инструментов, для ориентации роботов в пространстве.
Например, в робототехнике поворотные устройства используются для поворота манипуляторов, для ориентации инструментов и для сборки сложных изделий. В авиастроении поворотные устройства используются для ориентации двигателей и других компонентов самолета. В космической отрасли поворотные устройства используются для ориентации спутников и космических аппаратов.
Проблемы с обслуживанием и ремонтом
Обслуживание и ремонт поворотных устройств – это сложная задача, требующая специальных знаний и навыков. Необходимо регулярно проводить техническое обслуживание, чтобы предотвратить поломки и обеспечить надежную работу механизма. Также важно иметь запасные части, чтобы можно было быстро заменить вышедшие из строя компоненты.
В нашей практике часто возникают проблемы с износом подшипников и редукторов. Эти компоненты требуют регулярной смазки и замены. Также важно следить за состоянием приводных валов и соединений. Необходимо проводить регулярный осмотр и техническое обслуживание, чтобы выявить и устранить возможные проблемы на ранней стадии.
Перспективы развития
Развитие технологий приводит к появлению новых типов поворотных устройств, более компактных, более мощных, более точных и надежных. Все большее распространение получают приводы с обратной связью, а также интеллектуальные системы управления, которые позволяют автоматизировать процесс позиционирования и оптимизировать работу поворотного устройства.
Например, сейчас активно разрабатываются поворотные устройства с использованием искусственного интеллекта. Эти устройства могут самостоятельно адаптироваться к изменяющимся условиям и оптимизировать процесс позиционирования. Это направление имеет большой потенциал и может существенно повысить эффективность автоматизированных систем.
Что в итоге? Поворотное устройство – это сложный и многогранный механизм, требующий специальных знаний и навыков для проектирования, эксплуатации и обслуживания. Необходимо учитывать множество факторов, чтобы добиться максимальной эффективности и надежности. Но при правильном подходе можно создать устройство, которое будет служить долго и надежно, обеспечивая высокую точность позиционирования и автоматизацию производства.
Соответствующая продукция
Соответствующая продукция



Самые продаваемые продукты
Самые продаваемые продукты-
 Одноколоночный журнал
Одноколоночный журнал -
 Машина для выравнивания
Машина для выравнивания -
 Линия для производства дверных панелей
Линия для производства дверных панелей -
 Линия для производства спинок
Линия для производства спинок -
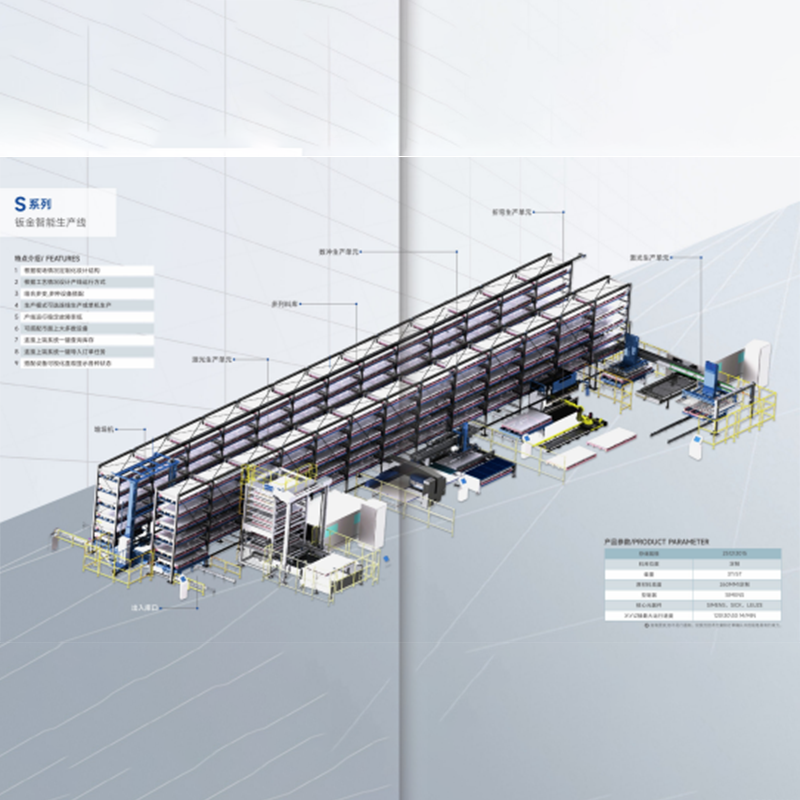 Интеллектуальная производственная линия для листового металла
Интеллектуальная производственная линия для листового металла -
 Сервоштамповочный пресс открытого типа с одним коленчатым валом
Сервоштамповочный пресс открытого типа с одним коленчатым валом -
 Моталка
Моталка -
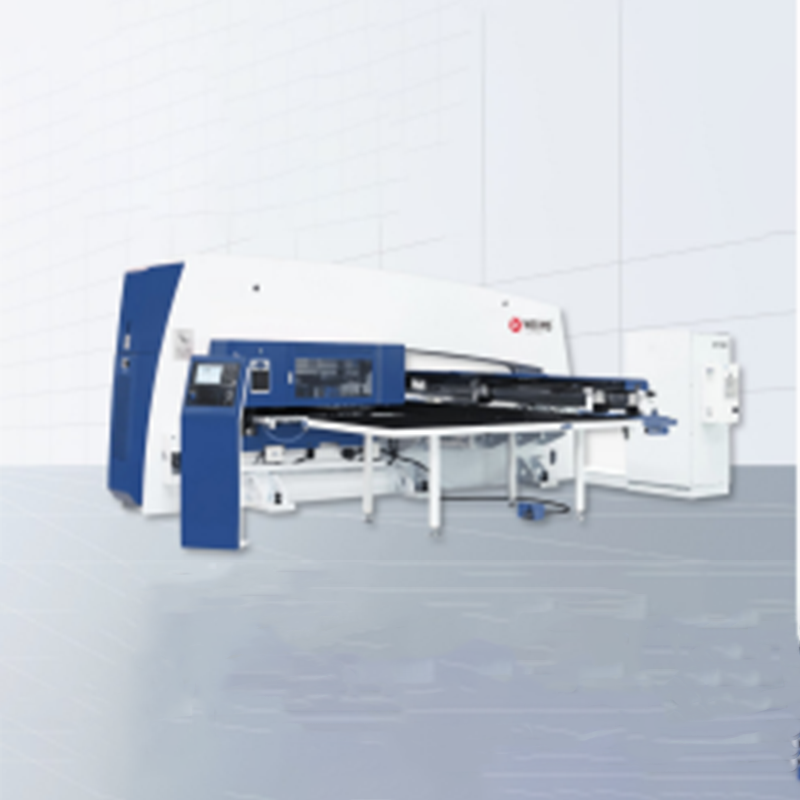 Электросерво ЧПУ револьверный пробивной станок
Электросерво ЧПУ револьверный пробивной станок -
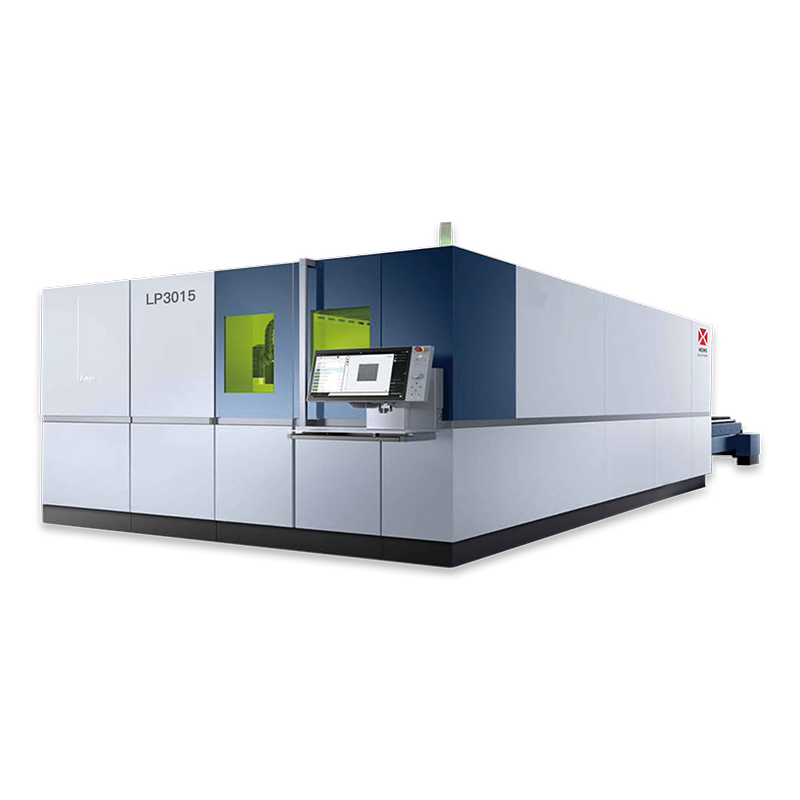 Лазерный станок для резки труб большого размера
Лазерный станок для резки труб большого размера -
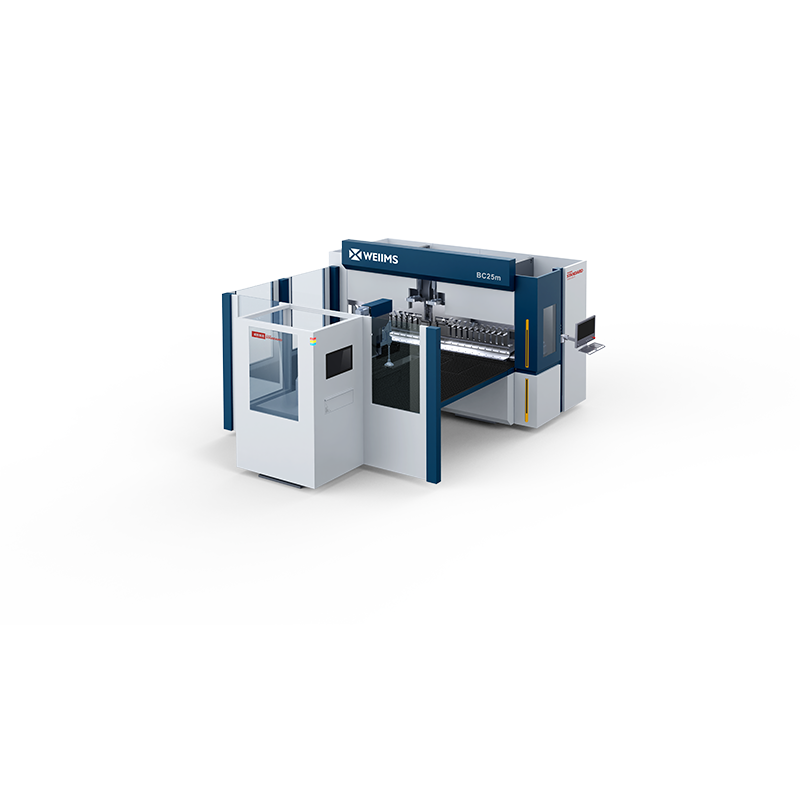 гибочный центр
гибочный центр -
 PC серия ЧПУ листового металла гибкой штамповки и резки производственной линии
PC серия ЧПУ листового металла гибкой штамповки и резки производственной линии -
 Линия для производства боковых панелей
Линия для производства боковых панелей
Связанный поиск
Связанный поиск- Известный деталь гидравлической системы
- Китай матрица для гибки листового металла
- Новый гибочный пресс
- Известный тулиевый волоконный лазер
- Известный гибочные станки с чпу для листового металла
- Дешево пробивные и вырубные станки с чпу
- Китай револьверные вырубные и обрезные станки с чпу
- Известный режущая головка raytools bm110
- Купить оборудование для гибки листового металла
- Дешево механическая пробивная и обрезная машина